分析小学机器人编程语言需求及设计,机器人编程语言
分析小学机器人编程语言需求及设计
机器人编程语言机器人可以分为两种类型:一种是机械式的,另一种是机械式的控制,通用的C语言是软件,另一种是模拟人工智能,更重要的是,算法与编程语言无关
小学生机器人编程用什么语言?
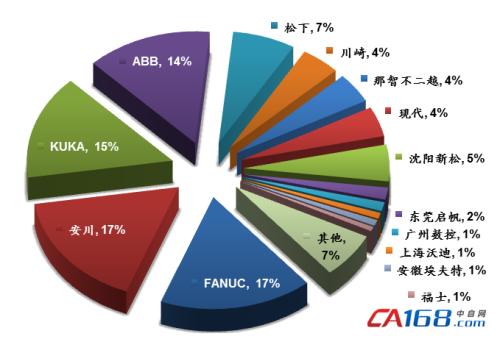
在学生计算机编程的早期阶段,他们可以用一种容易理解的方式学习模块化编程。在后期,他们可以学习C语言编程。随着儿童逻辑的发展,编程的难度增加了。它还允许孩子们按顺序进步。如果程序对时序要求不严格,可以使用VHDL、Verilog HDL和system C,这比硬件描述语言简单。 硬件的内部结构,基本不用考虑!否则,它怎么能被称为可编程逻辑器件呢?他的硬件和软件是分开的,这使得设计师从一开始就是特定的设备。不同工业机器人公司的机器人编程语言不同,每个公司都有自己的编程语言。 然而,无论变化有多大,其关键特征都非常相似。 例如,Staubli机器人的编程语言是VAL3,其风格类似于Basic。ABB的名称是RAPID,其风格类似于C;还有Adept Robotics的V+、Fanuc、KUKA、MO,不同制造商的机器人编程语言不同。 在风格上,主要分为欧美风格,如库卡和ABB。日本,如FANUC的莫托曼 这两个类别的区别在于,欧洲人认为应该先在电脑上编程,然后使用示教盒设置工具点坐标和机器人手的姿态。 日本人认为你应该先把你的想法写在笔记本上。云盘链接已通过私人信件发送给您。请看看这是否是你需要的。如果有任何朋友想要它,请点击“表扬”,并在下面的评论中留下您的联系信息。我希望答案能帮助你。如果你满意,请采纳它。如果没有,请继续提问。
机器人编程语言
机器人编程语言机器人可以分为两种类型:一种是机械式的,另一种是机械式的控制,通用的C语言是软件,另一种是模拟人工智能,更重要的是,算法与编程语言无关
小学生机器人编程用什么语言?
分析小学机器人编程语言需求及设计范文
摘要:本文首先总结了小学机器人编程语言的需求分析和小学机器人编程语言系统的设计,然后从词汇分析、语法分析和语义分析三个方面探讨了小学机器人编程语言解释器的实现。
:小学;机器人编程技术;口译员;
1序言
针对小学教学需要设计机器人编程语言是提高小学机器人编程教学的重要一步。传统的机器人编程语言教学与小学教学不相匹配,特别是在难度和难度方面,暴露出一系列问题。为了改善这种状况,许多研究者根据小学生的学习特点构建了相应的机器人编程语言,并借助尖端技术帮助教师提高学生的训练水平。使用专业编程语言有助于提高小学教学效率,在巩固和扩大教学成果方面发挥着重要作用。本文主要探讨程序设计语言中口译员的设计。
2小学机器人编程语言设计
2.1小学机器人编程语言需求分析
设计机器人语言系统的主要目的是方便机器人的编程和控制,同时满足机器人的接口和通信功能。因此,传统机器人语言系统的要求主要体现在以下几点:
(1)外部世界可以建模,因为机器人运动的环境在三维空之间,所以其语言系统需要描述空之间的物体;
(2)能够描述运动,这也是操作者控制机器人运动的基础。只要机器人的轨迹规划程序与轨迹生成程序相联系,开发者就可以将机器人应用到日常生产和生活中。
(3)允许操作机器人的运动过程,规定或改变执行过程,以满足不同的生产和生活需要;
(4)接口需要扩展,以方便操作员和传感器之间的信息交换;
(5)编程软件需要支持,可以为编程语言的运行提供良好的环境,从而提高编程效率。
除了以上基于小学教学设计的要求之外,还需要考虑以下两个方面:一方面,机器人教育的新颖性,机器人教学可以丰富小学信息技术课程的内容和形式,运用多样化的表达方式调动学生的学习动机,提高教师的教学效率;另一方面是困难。小学生的思维能力仍处于发展阶段。教师可以用简单的编程语言来分解课程的难点,让学生更容易理解编程教学的过程,降低编程教学的难度,同时,引导学生培养良好的分析能力和分析习惯。
2.2小学机器人编程语言系统的设计
在小学机器人编程教学中,机器人的语言系统分为五个部分,即通过文本编辑或教学生成的编辑器空、机器人源程序、负责词法(语法、语义)分析的解释器、轨迹规划和插值计算以及执行结构。解释器的过程是最复杂的,因为解释器负责将从源程序输入的文本转换成目标指令。本文还重点介绍了解释器的设计与实现。
3小学机器人编程语言解释器的实现
口译员的主要功能是词汇分析、语法分析和语义分析。词汇分析是识别源程序中的文本词,同时检查和转换这些词。语法分析是识别源程序的文本语法,同时检查语法结构。语义分析是识别源程序的文本语义并检测相应的错误信息。因此,基于上述功能,编程语言解释器系统的软件结构分为以下步骤:首先,在初始化处理的基础上加载源程序,然后分析形态,形态正确后进行语法分析,语法分析正确后进行语义分析,如果三项都有错误,解释器可以在上述步骤完成后基于符号表生成目标代码。
3.1词汇分析
基于小学机器人教学需要的机器人语言包括以下五种文字符号:关键词、标识符、常量(数字)、运算符和标点符号。词法分析程序的输入是机器人源程序文件,输出是为语法分析提供的字符串。在词法分析之前,需要构建一个关键字表。关键字表保存有字符指针数组,定义如下:字符*关键字[关键字字数];其中keywordsnum是一个宏定义,表示关键字的数量。该定义便于随时添加或删除关键字。分析程序应为关键字表提供查找操作,定义函数如下:int lookup(char *);该函数的输入参数是要搜索的字符串,它返回整数值代码键的内部代码。如果找不到返回值-1。
3.2语法分析
基于小学机器人教学需要的机器人语言语法分析使用正则表达式,主要有以下优点:一是可以通过简单的控制方法以复杂的方式控制字符串;其次,内部逻辑非常强大,能够适应各种环境。使用正则表达式对机器人程序进行语法分析包括三个过程:指令正则表达式的定义、初始化和匹配。在处理正则表达式的过程中,有些功能可以通过机器人控制器下位机使用的Linux系统提供的正则表达式处理库函数regcomp()和regexec()来实现。
3.3语义分析
经过词法分析和语法分析,如果没有错误,机器人程序在书写上是正确的,并且符合语法规则。语法正确性不能保证其语义正确性。要判断它是否正确,必须依靠语法分析。要生成目标代码,还需要一种翻译技术来将源程序翻译成目标代码。由于小学教学的效率和实施的困难,本研究中的语法分析程序不输出语法树,而只进行语法检查。在一般语义分析程序中,遍历语法树来实现语法引导的翻译过程,但是遍历语法树的效率较低,并且语法树的存储需要大量的内存,这对机器人数控系统要求的高实时性有一定的影响。因此,本文设计的语法分析程序仍然遍历机器人源程序作为语法检查和目标代码生成的输入。
[/s2/]4[概述/S2/]
综上所述,基于小学机器人教学要求的口译员的开发与研究,不仅可以降低小学编程教学的难度,从而提高小学生的逻辑思维能力、实际操作能力和语言表达能力,还可以提高学生对其他学科的理解,帮助学生全面发展。此外,编程语言的发展需要学校和教育部门的重视,并定期组织相关课题和研究。同时,教师还需要提高专业水平,实时了解相关程序设计教学的发展,并积极将其应用到相关程序设计教学中,丰富学生的知识储备,拓宽学生视野。
参考
[1]杨晓军、孟静凯、李鹏、周少凡。工业机器人代码解释器的开发[。机电工程技术,2018,47 (04) :92-96。
[2]张伟光。微操作机器人编程语言[。中国自动化研究所智能自动化专业委员会。2007年中国智能自动化会议录[。中国自动化学会智能自动化委员会:中国自动化学会智能自动化委员会,2007:6。


