太极拳运动者脊柱情况研究方法,太极拳在国内外的研究现状
太极拳运动者脊柱情况研究方法
国内外太极拳研究现状。(写论文)细节...请分析太极拳研究的现状摘要:对2003-07年发表在《中国武术》、《武林》、《少林太极》、《武魂》、《武当》等武术专业期刊上的885篇关于太极拳研究方向的文章进行梳理和分类,统计每一分类的数量和比例,分析相关研究内容,探讨太极拳研究的现状。

太极拳有那些科学的研究方法来说明其好处,怎样推...
这是我自己收藏太极拳的优点。 交给你吧 至于晋升 在你教别人之前,你应该走正确的路。 有太多老师教错了人。 学习太极拳有什么好处?1)生理益处:太极拳结合了传统的导引和呼吸方法,强调身体训练、气机训练和意义训练的密切配合 一方面,你可以一边练习一边锻炼肌肉。外国研究仍然是肤浅的。汉字拼音的翻译仍处于拳击框架阶段:河南省文县太极拳研究所首都体育学院Xiàtàjíquán yán JiíYuàn。 学校开设的民族传统体育专业包括太极拳研究和健身研究。 研究所?程序就是其中之一。关键是因为它是一个研究机构,所以需要一定数量的专家参与其中。 否则没有研究成果
太极拳在国内外的研究现状
国内外太极拳研究现状。(写论文)细节...请分析太极拳研究的现状摘要:对2003-07年发表在《中国武术》、《武林》、《少林太极》、《武魂》、《武当》等武术专业期刊上的885篇关于太极拳研究方向的文章进行梳理和分类,统计每一分类的数量和比例,分析相关研究内容,探讨太极拳研究的现状。
太极拳有那些科学的研究方法来说明其好处,怎样推...
太极拳运动者脊柱情况研究方法范文
第二章研究内容
本文目录导航:
【名称】太极拳对脊柱康复的生物力学机制(点击返回查看其他5篇医学硕士论文)
[第一章]太极拳的生物力学研究现状
[2.1]太极拳运动员脊柱状况的研究方法
[2.2]太极拳对脊柱及周围肌肉动态参数影响的分析
[第三章]太极拳在脊柱锻炼中的作用探讨
[第四章——参考文献]太极拳对脊柱生物力学影响的研究结论和参考文献
2.1,研究对象和方法
2.1.1、受试者和测试动作
本研究招募了一名陈氏太极拳女练习者作为生物力学实验对象。受试者40岁,体重43公斤和1。53米高。他们有近十年的陈氏太极拳练习经验,能够熟练而有规律地完成整套太极拳练习。
测量动作是陈氏太极拳,是陈氏王庭吉冈法教授的三丰太极拳和陈氏炮灰的结合。根据拳击中弧形圆圈的范围,可以分为大框和小框。陈氏太极拳(小框架)由78个动作组成,包括基本的太极拳动作,如站姿、单脚站立、行走、轮滑、马步、踢腿和一些特殊动作。
2.1.2.实验设备和仪器
1) Xsens MVN系统全身惯性运动捕捉系统
Xsens MVN是一款便携式全身惯性运动捕捉系统,配有惯性传感器,可安装在全身莱卡捕捉服或捕捉带上。因为Xsens MVN不使用相机拍摄,所以不会对对象的移动造成任何限制。它也适用于室内和室外工作环境,是一种具有极强灵活性的便携式运动捕捉系统。该产品避免了信号阻塞或标记混淆的问题,并节省了清理捕获数据所花费的时间。MVN简单易用,校准快捷,几分钟内即可安装并投入使用。

图2-1 Xsens MVN全身惯性运动捕捉系统
系统通过Xsens公司的Awinda模块实现同步数据采集(如图2-2所示)。Awinda提供四个同步接口(BNC接口,输入和输出接口分别为2个)。同步信号(3。3v高电平或Ov电平)和同步信号(3。3v高电平或Ov电平由软件产生)可以通过输出接口传输。计算机安装的运动数据采集软件(Xsens MVN专业版)根据信号自动执行启动数据采集或停止数据采集等操作。有两种控制方法:
主控方式:在数据同步采集处理模块中预先设置哪些操作触发发送同步指令(如点击开始采集或点击停止采集)。在执行设定操作时,软件向同步模块发送同步指令,同步模块在接收到同步指令后向其他同步采集系统发送同步信号(高电平或低电平)。
受控模式:预先设置数据同步采集处理模块中同步指令对应的操作(如开始数据采集或结束数据采集)。同步模块接收到其他同步采集系统发送的同步信号(高电平或低电平)后,将其转换为同步指令,发送给数据同步采集处理模块,并触发相应的操作。
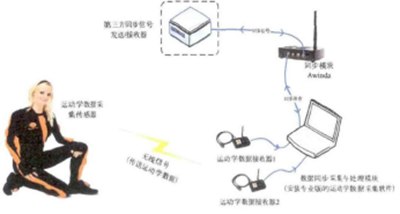
图2-2运动学数据的同步采集
2)F-扫描足底压力分析系统
该系统由美国的TecScan公司开发。F-Scan测量系统在受试者的鞋子中放置了一个轻便、可重复使用的鞋垫传感器,并完整记录了足部压力。它可以实时识别、显示和记录足底压力和力。其可弯曲的特征允许用户不受任何阻碍地移动,并保持自然的步态和运动,从而获得最真实的压力数据,而不干扰人体运动。本研究利用该系统进行足底压力测试,用以获取太极拳练习过程中的足底压力数据。

图2-3 tec扫描薄膜压力传感器和F扫描足底压力分析系统
3)任何人人体模拟建模系统
“任何人建模系统”(Anywhere Modeling SystemT)是一款专业的人体骨骼和肌肉模拟建模软件。它是由丹麦奥登堡大学开发的,用于解决人体骨骼和肌肉动力学问题。自2004年以来,“35”o Anywhere软件的商业应用可以分析不同条件下人体肌肉和骨骼的应力状况,为人体运动建模和生物医学工程研究提供了一个全新的平台。任何软件都可以通过逆向动力学分析模拟肌肉力量,满足人体完成任何运动时的生物力学和载荷分析。在这项研究中,“任何建模系统”将用于太极拳的生物力学建模。

图2-4任何人建模系统
2.1.3.研究方法
1)文件方法
文献数据法是自然科学研究中的一种重要研究方法,广泛应用于医学、生物力学等研究领域。该方法主要是在研究主题的基础上,采用不同的检索方法收集、识别、筛选、整理和总结与研究主题相关的已发表文献,并进行总结分析,了解现有研究的进展和不足。本研究主要通过PubMed、CNKI期刊全文数据库、优秀博士/硕士论文全文数据库,并利用百度、谷歌搜索引擎搜索关键词“太极拳”、“生物力学”、“太极”、“生物力学”等关键词,整理相关文本数据、图像数据、音频数据等,为研究设计和论文写作提供理论依据。
2)《专家咨询法》
这项研究涉及临床医学、生物力学、运动学、民族传统体育等多个学科和领域。因此,在研究过程中,笔者多次咨询了北京协和医院骨科专家、北京航空航天导航空大学生物工程研究所教授、中国航天员科研训练中心人因工程实验室的研究人员,询问了研究设计、研究内容、数据分析、临床意义等问题。同时,我们将与许多长期练习太极拳的人交流,倾听他们对太极拳康复效果的主观感受和对本研究的建议。
3)生物力学实验
本研究中应用的生物力学实验方法主要包括:
(1)足底压力测量:足底压力测量技术和步态分析基于生物力学原理,获取测试仪静态或动态条件下的足底压力分布特征和变化,分析研究足底压力分布特征和变化,评价人体一定条件下足底和下肢的生物力学特征。近年来,该技术已广泛应用于临床研究,为科学康复治疗方法的设计提供了先进的技术支持。常见的足底压力测量技术包括:足印法、足底压力扫描仪、测力板、三维测力台、压力鞋垫等。本研究中使用的F-Scan足底压力系统由美国TecScan公司开发的有线薄膜网格触觉压力传感器组成。根据受试者脚的大小将其裁剪成合适的鞋垫形状,放在受试者的鞋内,实现太极拳运动中的动态测量。
(2)运动数据采集:在生物力学研究中,有多种运动捕捉方法来采集运动过程中的力学数据。目前,常用的运动捕捉设备包括:高速摄像机、光学传感器、惯性传感器等。本研究利用Xsens MVN系统的全身惯性运动捕捉系统,对陈式太极拳的整套练习过程进行数据采集。
(3)人体仿真模型的建立:人体运动的可视化和仿真一直是生物力学研究的核心内容之一。运动过程中人体模拟模型的建立将有助于研究运动过程中人体内骨骼和肌肉的真实运动。本研究利用人体建模与仿真系统建立了受试者太极拳运动的仿真模型,并利用该系统分析了陈氏太极拳运动中脊柱及周围肌肉的生物力学指标,包括:肌肉激活度、脊柱关节应力、脊柱关节力矩、脊柱关节角度等。
2.1.4、运动学实验平台建设及预实验
1)基于上述实验设备和研究方法,本研究搭建了一套适合太极拳运动学研究的实验平台。该平台由三部分组成:F-扫描器有线足底压力测试系统、可穿戴Xsens MVN系统无线全身惯性运动捕捉系统和人体仿真建模系统。它可以应用于人体任何静态或动态下的力学数据采集,经过分析和处理,可以得到人体所有骨骼和肌肉在一定静态或动态作用下的运动规律和生物力学数据。
2)预实验
实验时间:2018年1月17日
地点:中国航天员科研训练中心人因工程实验室
实验内容:验证运动学实验平台的有效性和准确性。实验选取了两名受试者,分别采集他们的基本信息(身高、体重、年龄),并配备足底压力测量鞋垫和全身惯性运动捕捉设备。首先,通过单脚站立和双脚交替站立的方法对足底压力测量系统进行机械校正,使得校正后的足底压力值与受试者自身重力值之间的差值小于1090。然后无线全身惯性运动捕捉系统通过三组基本运动(手放低直立、大字母站立、伸展手臂半蹲)进行校正,使系统呈现的人体模拟图像与受试者的身体形状和运动一致。校正后,受试者被指示以恒定速度行走,以收集行走过程中的足底压力分布和变化,捕捉行走运动状态,并检查两个系统同时收集的数据的一致性。然后将采集的数据进行初步分析和仿真建模,验证数据的准确性和实验的可行性。

图2-5预实验
2.1.5运动学数据收集和处理
1)基本信息
实验时间:2018年1月24日;地点:中国航天员科研训练中心人因工程实验室;
实验设备及耗材:Xsens MVN系统全身惯性运动捕捉系统、F-扫描力分析系统、2台笔记本电脑、1个移动电源、4条数据线、透明胶带、刀具等。
2)实验过程
本实验以一名陈氏太极拳女练习者为研究对象,收集了该对象的基本信息和人体惯性参数:年龄40岁,体重43公斤,身高1。53m,英尺长0。225米,大腿长度0。37米,小腿长度0。36m,行李箱长度0。55m,上臂长度0。28米,前臂长度0。22m,手长0。16m等。将信息输入足底压力测量系统和全身惯性运动捕捉系统,分别建立运动模型。在实验者的帮助下,受试者穿戴足底压力测量鞋垫和全身惯性运动捕捉设备。受试者需要确保足底压力传感器的平整度。实验人员检查惯性传感器标记位置的准确性(包括标记的相应位置、方向和工作状态),然后进行调试,确认计算机能够准确接收数据信息,保证各种仪器设备的正常工作。应用与预实验相同的校准方法来校正对象的运动模型,使得足底压力数据和运动捕捉图像与对象的真实情况一致。校正后,固定足底压力传感器的数据线和移动电源的位置,并安排实验人员安排电路,防止数据线在测试过程中缠绕,保证太极拳的顺利进行。
受试者热身后,实验者解释实验过程中的注意事项。准备完成后,受试者将通过发出数字和密码开始陈式太极拳练习,同时收集练习过程中足底压力分布和变化数据,并捕捉陈式太极拳的所有动作。在实验过程中,技术人员初步校对实时采集的足底压力数据和建立的运动模型,以防止数据异常或模型错误。太极拳练习结束后,受试者将发出一个数字来结束密码并结束实验。
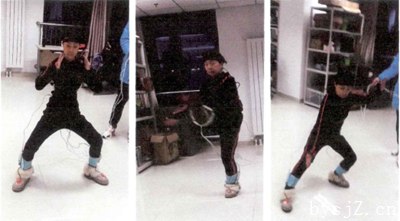
图2-6太极拳数据采集
3)数据处理
实验者检查所收集数据的同步性、有效性和准确性,并将足底压力数据和运动捕捉标记数据处理成可以导入任何人仿真建模系统的正确格式。
2.1.6任何人仿真模型的建立
在任何人建模系统中,虚拟人仿真过程如图所示,主要包括人体结构、参数个性化和动作驱动。

图2-7任何人模拟过程
1.人体结构
人体结构主要由骨骼、关节和肌肉组成。
骨骼模型:在本研究中,任何人建模系统下的通用全身骨骼模型用于仿真分析。人体分为17个部分,并与不同类型的关节相连。
关节模型:任何软件都提供不同类型的关节来连接身体各部分。根据自由度,关节主要分为三种类型:单自由度关节(膝)和双自由度关节(肘和腕)。冲压)和三自由度关节(肩部和骨骼);根据旋转的类型,可分为球形、旋转式、圆柱形等。
肌肉模型:任何常用的肌肉模型包括简单肌肉模型、二元肌肉模型和希尔肌肉模型。希尔肌肉模型也叫三元模型,相对精确。在任何人身上,只能选择简单的肌肉模型来分析躯干。
2.参数个性化
模型参数的个性化是建模和仿真过程中的一个重要环节。人体形状参数包括虚拟人的身高、体重、长度、质量、惯性矩等参数。在建模和仿真分析中,虚拟人模型中的参数需要根据仿真分析需求和实验测试技术现状进行修改,实验模型需要个性化,以保证仿真分析结果的有效性。
该模型设定了女子太极拳运动员的长度参数和质量参数,如下表所示:
表2-1受试者的生理参数

3.动作驱动
在建模过程中,需要根据运动参数驱动虚拟人体模型,参数输入主要包括驱动模式和人体与环境的约束力两部分。
驾驶模式:可以为模型在运动过程中提供身体姿态信息,主要包括标记点驾驶和关节角度驾驶两种模式。在运动生物力学建模中,利用运动捕捉的标志点数据驱动模型运动是一种重要的模型驱动方法。该方法能够准确确定人体运动中的姿态,因此本研究采用标记点驱动方法来驱动虚拟人。
标记点数据是通过同步摄像机跟踪附着在人体上的光学标记点获得的。为了获得运动中人体的姿态,需要建立运动标记点的坐标系来将运动标记点与人体相关联。
虚拟人使用30个标记点,并固定在人体的四肢和躯干上,以确定运动中各种人体片段的位置和姿势,如图所示:

图2-8标记点的位置
人体与环境之间的约束力:它是决定人体关节和肌肉应力的重要输入参数,包括操作力和足底压力等数据。由于太极拳过程中没有操作力,只有足底与环境的接触力,与运动同步的足底压力数据被输入到模型中。
通过以上建模步骤,建立了虚拟人太极拳动作模型。

图2-9太极拳动作模拟模型
返回本文目录导航


