变电厂智能巡视机器人系统组成、功能及常见故障,发电厂是否有具有智能电表识别功能的智能机器人?
变电厂智能巡视机器人系统组成、功能及常见故障
发电厂是否有具有智能电表识别功能的智能机器人?这件事需要的技能是,有一个新的专业技术村,用设备制造来学习这个技能,然后升级到10级,然后换成一台机器花1000元,或者去交易购买一台估计不便宜的机器,然后收集材料,然后做一个心脏。如果有时间限制,时间限制不能增加,但只有钢铁般的心可以重做。建议你15天内不要欺骗父亲。
悠阔UK-R200变电站智能巡检机器人的技术怎样?
变电站智能巡检机器人集成了激光雷达导航定位、红外测温、智能仪表识别、图像识别、大数据分析决策系统、无线自主充电等核心技术。
发电厂是否有具有智能电表识别功能的智能机器人?
发电厂是否有具有智能电表识别功能的智能机器人?这件事需要的技能是,有一个新的专业技术村,用设备制造来学习这个技能,然后升级到10级,然后换成一台机器花1000元,或者去交易购买一台估计不便宜的机器,然后收集材料,然后做一个心脏。如果有时间限制,时间限制不能增加,但只有钢铁般的心可以重做。建议你15天内不要欺骗父亲。
悠阔UK-R200变电站智能巡检机器人的技术怎样?
变电厂智能巡视机器人系统组成、功能及常见故障范文

500千伏智岩变电站智能改造是国家电网公司智能变电站升级改造的三个试点项目之一。也是500千伏电压等级变电站唯一的智能化改造项目。作为智岩变电站智能化改造的重要组成部分,以智能巡检机器人为核心,固定监控点,建立了覆盖全站的变电站智能巡检系统。智言变压器智能巡检机器人系统自投入运行以来,已经多次维护和升级。现场运行总体良好,但也存在一些缺陷和技术缺陷。通过对运行维护中典型故障案例的分析,有利于系统的稳定运行。
1智能巡逻机器人系统的组成
变电站智能巡检机器人系统由网络分布式体系结构组成,如图1所示。系统分为三层:基站层、通信层和终端层。基站层由监控后台组成,是整个系统的数据接收、处理和显示中心。它由数据库、模型配置、设备接口、数据处理、视图显示等模块组成。基站层通过图像处理、模式识别等技术实现设备缺陷的自动识别和报警。
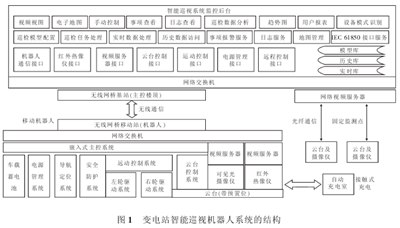 通信层由网络交换机、 无线网桥基站及无线网桥移动站等设备组成, 采用 Wifi 802.11n 无线网络传输协议, 为站控层与终端层间的网络通信提供透明的传输通道。终端层包括移动机器人、 充电室和固定视频监测点。 移动机器人与监控后台之间为无线通信。 固定视频监测点与监控后台之间采用光纤通信。 充电室中安装充电机构, 机器人完成巡视任务后或电量不足时, 自动返回充电室进行充电。通信层由网络交换机、无线网桥基站、无线网桥移动站和其他设备组成。采用Wifi 802.11n无线网络传输协议,为站控层和终端层之间的网络通信提供透明传输通道。终端层包括移动机器人、充电室和固定视频监控点。移动机器人和监控背景之间有无线通信。固定视频监控点与监控后台之间采用光纤通信。充电室安装有充电机构,机器人在完成巡逻任务后或电量不足时会自动返回充电室充电。
通信层由网络交换机、 无线网桥基站及无线网桥移动站等设备组成, 采用 Wifi 802.11n 无线网络传输协议, 为站控层与终端层间的网络通信提供透明的传输通道。终端层包括移动机器人、 充电室和固定视频监测点。 移动机器人与监控后台之间为无线通信。 固定视频监测点与监控后台之间采用光纤通信。 充电室中安装充电机构, 机器人完成巡视任务后或电量不足时, 自动返回充电室进行充电。通信层由网络交换机、无线网桥基站、无线网桥移动站和其他设备组成。采用Wifi 802.11n无线网络传输协议,为站控层和终端层之间的网络通信提供透明传输通道。终端层包括移动机器人、充电室和固定视频监控点。移动机器人和监控背景之间有无线通信。固定视频监控点与监控后台之间采用光纤通信。充电室安装有充电机构,机器人在完成巡逻任务后或电量不足时会自动返回充电室充电。
2智能巡逻机器人系统的主要功能
变电站智能巡检机器人系统分为两部分:基站和移动台机器人本体。根据现场工作的要求,机器人的主要功能应能满足日常设备检查、红外测温、开关刀现场位置检查的要求,并实现一键顺序控制。主要功能包括:
(1)自动导航功能。通过磁迹和无源电子标签进行自主导航和定位,并根据预先规划的路线执行自动巡逻检查任务;差动转向,原地转向;最优路径规划和双向行走,指定观察目标后计算最优行驶路线;在磁力导航过程中,超声波会自动停止障碍物。巡逻任务完成后或电量不足时,自动返回充电室充电。
(2)灵活的控制功能。机器人本体、云台、可见光和红外摄像机可以通过监控背景进行手动控制。实现自动和手动设备检测、近控和远控的相互转换;结合顺序控制系统,检查断路器和隔离开关的位置。
(3)设备检测功能。根据预设的观察位置,自动捕捉设备的红外和可见光图像,发现原设备损坏、异物、锈蚀、松动、漏油等缺陷以及电流、电压等热缺陷;识别断路器和隔离开关的通断状态;读取仪表读数和油位表位置;检测运行设备的异常声音。通过最佳路径快速移动到被控设备的最佳观察位置,顺序采集断路器或隔离开关三相设备的图像,自动识别设备的通断状态,并向顺序控制系统报告,实现被控设备位置的自动检查。
(4)特殊巡逻功能。在恶劣天气或危险环境下,可代替工作人员对指定设备进行特殊检查。通过手动控制和调整机器人云台的位置,可以近距离观察设备,为现场分析和判断提供直接依据。
(5)设备状态分析和报警。设备缺陷或故障的智能分析和报警;自动发送巡检数据(温度、开/关状态、仪表读数等)。)和缺陷警报信息传送到其他信息管理系统;根据设备类型,提供设备红外图像库、设备缺陷或故障原因分析和处理方案,协助操作人员积累操作经验,提高设备缺陷识别和处理能力。
3智能巡逻机器人系统常见故障的处理
3.1红外热像仪通信中断
红外通信有两种中断:一种是图像的完全中断;二是红外热像仪在巡视过程中频繁中断,通信每20-30秒中断一次,导致许多观测点巡视数据丢失,监控后台报告机器人红外热像仪通信中断报警。处理时,通常只需重启机器人或桥式转换器即可恢复。如果无法恢复,可能是机器人通信天线损坏或红外热像仪本身损坏。自机器人投入运行以来,通信天线损坏了两次,红外热像仪损坏了一次,已被原备件更换或通过联系制造商进行处理。
3.2机器人车轮停止
机器人车轮的故障通常是由驱动电机的故障引起的,自其投入运行以来只发生过一次。造成这种情况的主要原因有两个:一是在雨天检查车轮驱动电机的进水情况;第二,在夏季持续高温下,由于地面温度高,电机烧毁。这种情况只能通过联系制造商来解决。
3.3机器人通信中断
当智能巡更系统后台报告机器人通讯中断时,操作人员应首先检查机器人是否有足够的电源,天线是否完好,后台程序是否运行正常,其次检查机器人是否与后台系统无线网桥正确连接,通讯是否正常。在这种情况下,智能巡检系统和无线网桥转换器的后台程序通常可以依次重启。
3.4机器人不能返回充电室。
机器人有很多次这样的失败。主要原因包括:磁迹损坏导致机器人无法检测磁导航信号,射频识别(射频识别)点损坏导致机器人无法正确定位,磁迹上存在障碍物。在这种情况下,应该关闭机器人的电源,然后将机器人推回到充电室并充电,并且应该消除故障。
3.5机器人没有执行常规检查任务。
智能巡逻系统没有执行预定的巡逻任务,主要是因为机器人与背景之间的通信中断,预定的巡逻任务没有启动,机器人控制模式为手动模式,机器人充电不足。在这种情况下,有必要检查巡视检查任务是否已经正常开始,机器人控制模式应该设置为自动模式,并且机器人应该完全通电。
智能巡逻机器人系统操作注意事项
4.1确保机器人巡逻路线畅通
如果检查路线上的人孔盖或电缆沟盖板被拆除,且未能及时恢复正常,机器人很可能在检查过程中损坏。机器人的超声波越障功能可以在一定程度上避免碰撞事故,但超声波越障中存在一定的盲区,例如可能检测不到异常情况,导致机器人电机旋转受阻和烧毁。机器人使用磁迹导航和射频识别定位。如果磁迹损坏,射频识别丢失,也可能导致错误的路线,甚至在机器人检查过程中损坏。因此,在机器人的检测过程中,有必要保证路线的畅通和完整的磁迹和射频识别。
4.2避免在极端天气下开始巡逻
经过防水测试,机器人已经达到IP53的防护等级,能够完全应对普通雨天。然而,在应对暴雨等极端天气时,可能存在隐患。雨天,图像效果也会受到一定程度的影响。因此,在暴雨等极端天气,建议尽可能避免开始巡逻任务,并提前关闭常规巡逻任务。
4.3临时和顺序控制任务和手动控制
在创建临时任务和执行顺序控制任务时,需要确认机器人处于停止点或者在停止点的停车方向和停车距离范围内,这便于机器人确定其位置和车体方向。当无法确定机器人的位置时,应首先启动寻道任务,在机器人自动停止任务后,应创建临时任务或顺序控制任务。
在特殊情况下,手动控制机器人时必须特别注意安全。打开控制平台并切换到手动控制模式。您可以点击界面上的箭头,或者使用键盘的向上、向下、向左和向右方向键来控制机器人的移动方向,而空网格键代表停止。单击箭头和按键机器人继续加速,并单击相反方向的箭头和按键机器人减速。注意尽可能低速行驶,避免倒车。如果发现它无法控制,您可以尝试先用鼠标单击运动控制窗口,然后再控制它。在紧急情况下,你需要直接关闭机器人的电源。
4.4充电室自动开门和关门及机器人重启和关机
当从后台计算机手动控制自动门时,确保相应的机器人靠近充电室,并且自动门的两个天线之间没有严重的屏蔽。当充电室配电箱内的通讯指示灯为绿色时,表示自动门的通讯连接正常。
在机器人从后台计算机重启后,可以恢复机器人的初始状态。然而,在机器人从后台计算机断电后,只能通过当场按下机器人启动按钮来启动机器人并恢复到其初始状态。
4.5加强维护
尽量避免接触或摇动机器人的敏感部件,如刮水器和天线,以防止损坏。确保机器人后台正常运行,后台关机,待机休眠,异常运行等。,会导致机器人无法正常完成巡逻任务。为了保持良好的外观和检查效果,需要定期对机器人本体和摄像机镜头进行机器人清洗。
结论
从智能巡逻机器人系统日常运行维护中的典型故障案例出发,得出了相应的对策,并总结了其运行维护中的注意事项。智能巡逻系统的日常工作需要稳定的运行环境和精心的维护。操作人员必须经过培训,熟悉操作步骤和注意事项,掌握异常处理方法,才能安全控制机器人,完成变电站智能巡检工作。
参考:
陈树勇,宋方舒,李兰馨,等。智能电网技术概述[。网格技术,2009,33 (8): 1-7。
周李惠,张永生,孙勇等。智能变电站巡检机器人的开发与应用。2011年,35 (19): 85-88。


